Autonomous Car Programming for AWS DeepRacer

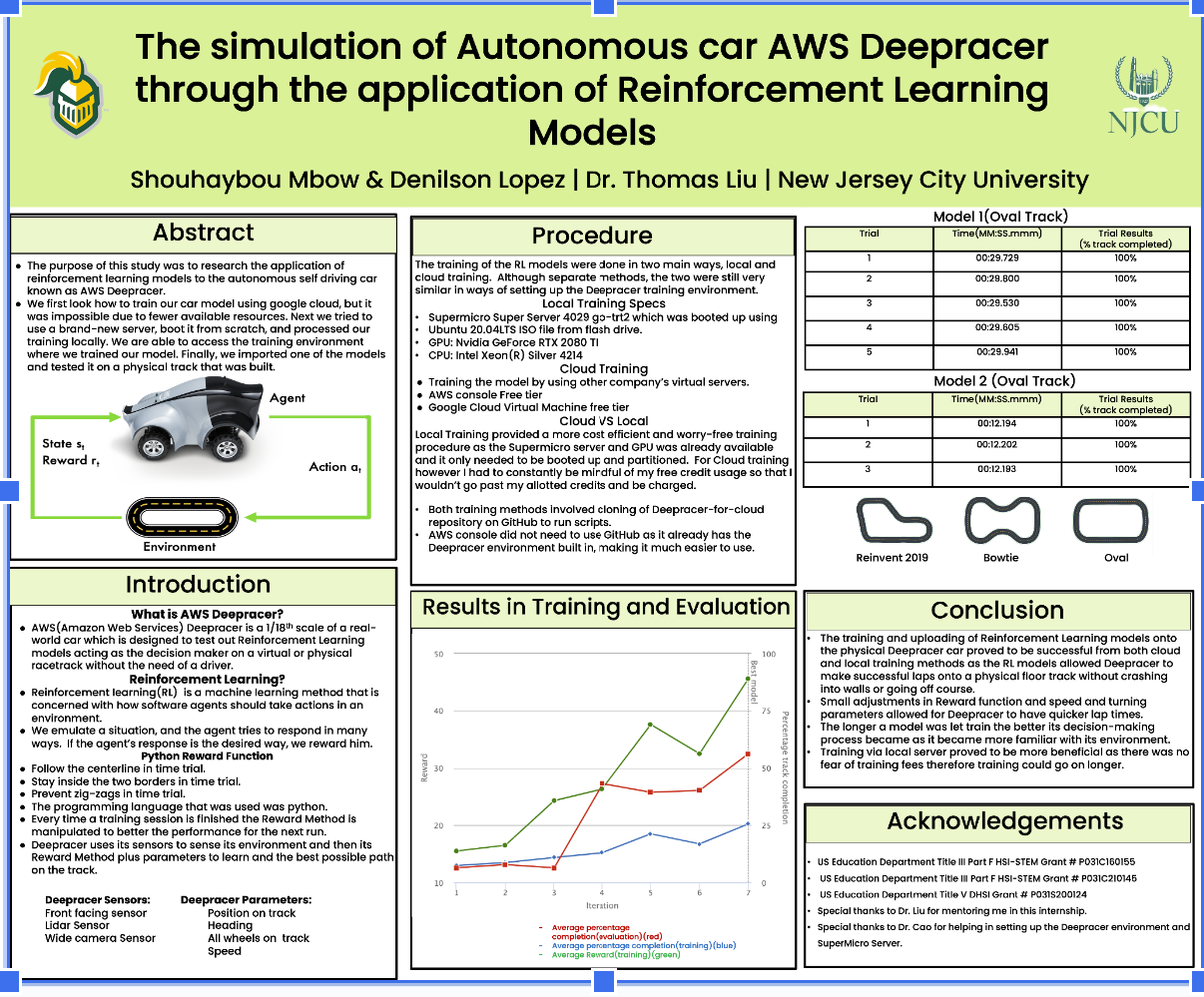
This project focuses on training an autonomous vehicle using AWS DeepRacer. AWS DeepRacer allows you to get hands-on with reinforcement learning, an advanced machine learning technique. The project involves setting up the simulation environment, training the model, and evaluating its performance. I have presented and effectively communicated complex technical concepts and results to both technical and non-technical audiences in multiple symposiums. Two videos which show the training phase and testing phase can be viewed at the bottom.
Project Details
Technologies Used: AWS DeepRacer, Python, Reinforcement Learning
Key Features:
- Simulation setup in AWS DeepRacer console
- Custom reward function development
- Training and evaluating the reinforcement learning model
- Deployment for real-world testing
Some of the Code
# Custom Reward Function for AWS DeepRacer
def reward_function(params):
# Read input parameters
track_width = params['track_width']
distance_from_center = params['distance_from_center']
speed = params['speed']
steering_angle = abs(params['steering_angle'])
# Define reward and penalties
reward = 1.0
if distance_from_center <= track_width * 0.1:
reward += 1.0
elif distance_from_center <= track_width * 0.25:
reward += 0.5
else:
reward -= 1.0
# Penalize if the car is steering too much
if steering_angle > 15:
reward *= 0.8
# Reward higher speeds
if speed > 2.0:
reward += 1.0
return float(reward)
Poster